UtilisationMoteur » Historique » Version 10
Alexandre FIALE, 17/03/2016 16:09
| 1 | 1 | Alexandre FIALE | UtilisationMoteur |
|---|---|---|---|
| 2 | ================= |
||
| 3 | |||
| 4 | Sketch |
||
| 5 | ------ |
||
| 6 | |||
| 7 | Voici le sketch utilisé pour l'atelier : |
||
| 8 | |||
| 9 | int motor1P1 = 2; |
||
| 10 | int motor1P2 = 3; |
||
| 11 | int motor1PWM = 9; |
||
| 12 | int delai = 2000; |
||
| 13 | void setup() { |
||
| 14 | Serial.begin(9600); |
||
| 15 | pinMode(motor1P1, OUTPUT); |
||
| 16 | pinMode(motor1P2, OUTPUT); |
||
| 17 | pinMode(motor1PWM, OUTPUT); |
||
| 18 | } |
||
| 19 | |||
| 20 | void loop() { |
||
| 21 | delay(delai); |
||
| 22 | forward(); |
||
| 23 | delay(delai); |
||
| 24 | backward(); |
||
| 25 | delay(delai); |
||
| 26 | stopMotor(); |
||
| 27 | delay(delai); |
||
| 28 | } |
||
| 29 | |||
| 30 | void forward() { |
||
| 31 | int i =0; |
||
| 32 | digitalWrite(motor1P1, HIGH); |
||
| 33 | digitalWrite(motor1P2, LOW); |
||
| 34 | |||
| 35 | for(i=0; i<255; i++) { |
||
| 36 | analogWrite(motor1PWM, i); |
||
| 37 | Serial.print('speed'); |
||
| 38 | Serial.println(i); |
||
| 39 | } |
||
| 40 | } |
||
| 41 | |||
| 42 | void backward() { |
||
| 43 | int i =0; |
||
| 44 | digitalWrite(motor1P1, LOW); |
||
| 45 | digitalWrite(motor1P2, HIGH); |
||
| 46 | |||
| 47 | for(i=0; i<255; i++) { |
||
| 48 | analogWrite(motor1PWM, i); |
||
| 49 | } |
||
| 50 | } |
||
| 51 | |||
| 52 | void stopMotor() { |
||
| 53 | digitalWrite(motor1P1, LOW); |
||
| 54 | digitalWrite(motor1P2, LOW); |
||
| 55 | } |
||
| 56 | |||
| 57 | |||
| 58 | Schéma de cablage |
||
| 59 | ------ |
||
| 60 | 3 | Alexandre FIALE | |
| 61 | 10 | Alexandre FIALE | <ins>/!\\</ins> Attention aux pins PWM, certaines sont en FAST PWM et d'autre en Phase-Correct PWM, ce qui peut influencer les délais et le traitement des données. (https://www.arduino.cc/en/Tutorial/SecretsOfArduinoPWM) |
| 62 | 1 | Alexandre FIALE | |
| 63 | 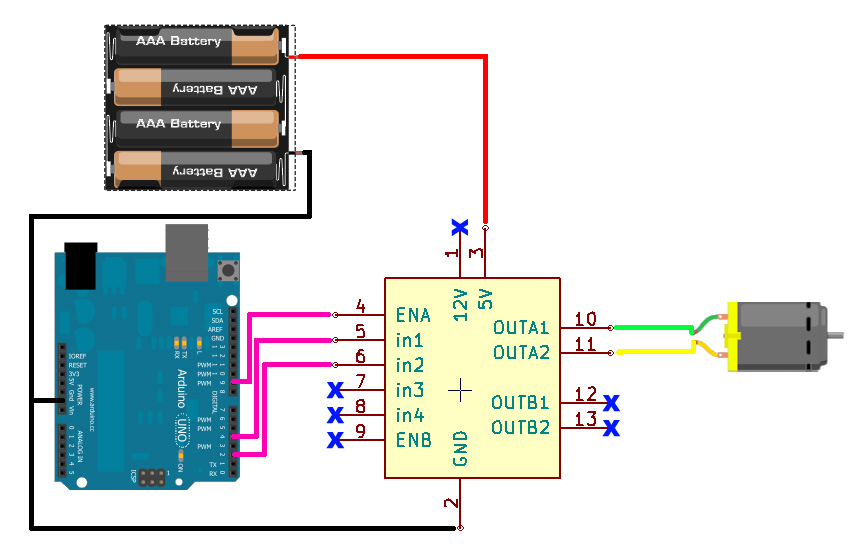 |
||
| 64 | 8 | Alexandre FIALE | |
| 65 | |||
| 66 | Bon cablage! |
||
| 67 | AlexF. |