Actions
UtilisationMoteur¶
Sketch¶
Voici le sketch utilisé pour l'atelier :
int motor1P1 = 2;
int motor1P2 = 3;
int motor1PWM = 9;
int delai = 2000;
void setup() {
Serial.begin(9600);
pinMode(motor1P1, OUTPUT);
pinMode(motor1P2, OUTPUT);
pinMode(motor1PWM, OUTPUT);
}
void loop() {
delay(delai);
forward();
delay(delai);
backward();
delay(delai);
stopMotor();
delay(delai);
}
void forward() {
int i =0;
digitalWrite(motor1P1, HIGH);
digitalWrite(motor1P2, LOW);
for(i=0; i<255; i++) {
analogWrite(motor1PWM, i);
Serial.print('speed');
Serial.println(i);
}
}
void backward() {
int i =0;
digitalWrite(motor1P1, LOW);
digitalWrite(motor1P2, HIGH);
for(i=0; i<255; i++) {
analogWrite(motor1PWM, i);
}
}
void stopMotor() {
digitalWrite(motor1P1, LOW);
digitalWrite(motor1P2, LOW);
}
Schéma de cablage¶
/!\ Attention aux pins PWM, certaines sont en FAST PWM et d'autre en Phase-Correct PWM, ce qui peut influencer les délais et le traitement des données. (https://www.arduino.cc/en/Tutorial/SecretsOfArduinoPWM)
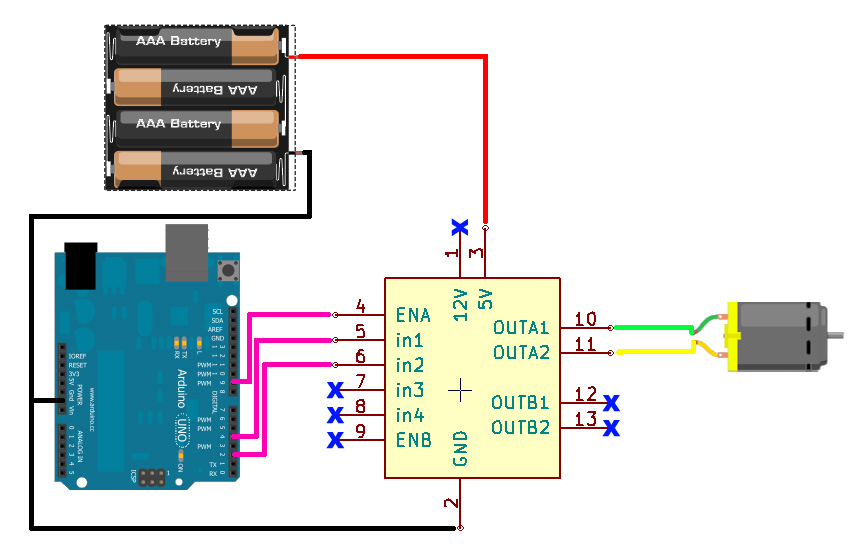
Bon cablage!
AlexF.
Mis à jour par Alexandre FIALE il y a plus de 10 ans · 10 révisions